3QFP: Efficient neural implicit surface reconstruction using Tri-Quadtrees and Fourier feature Positional encoding
May 13, 2024· ,,·
0 min read
,,·
0 min read
Shuo Sun
Malcolm Mielle
Achim J. Lilienthal
Martin Magnusson
Abstract
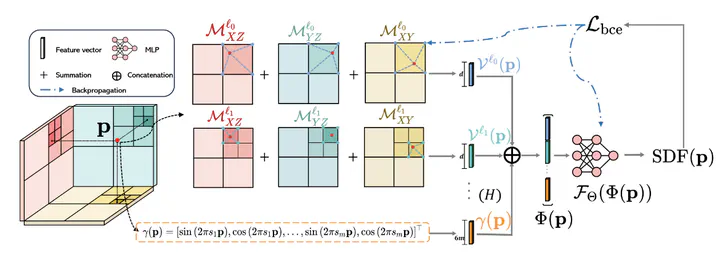
Neural implicit surface representations are currently receiving a lot of interest as a means to achieve high-fidelity surface reconstruction at a low memory cost, compared to traditional explicit representations.However, state-of-the-art methods still struggle with excessive memory usage and non-smooth surfaces. This is particularly problematic in large-scale applications with sparse inputs, as is common in robotics use cases. To address these issues, we first introduce a sparse structure, emphtri-quadtrees, which represents the environment using learnable features stored in three planar quadtree projections. Secondly, we concatenate the learnable features with a Fourier feature positional encoding. The combined features are then decoded into signed distance values through a small multi-layer perceptron. We demonstrate that this approach facilitates smoother reconstruction with a higher completion ratio with fewer holes. Compared to two recent baselines, one implicit and one explicit, our approach requires only 10%–50% as much memory, while achieving competitive quality.
Type
Publication
2024 IEEE International Conference on Robotics and Automation (ICRA)